祝贺卢伟团队在国际学术期刊Sensors发表论文
2019-10-01 智能机器人实验室

祝贺卢伟团队在国际学术期刊Sensors发表论文
最近,团队在国际学术期刊《Sensors》发表一篇论文,提出一种基于耕作土壤边界线的拖拉机视觉导航算法。(影响因子3.031, Q1,第一署名单位为南京农业大学,第一作者和通讯作者均为卢伟副教授(南京农业大学),第二作者为曾梦洁)
该研究团队针对智能拖拉机耕作模式下的自主导航,提出一种基于导向滤波和改进抗噪形态学的耕作土壤边界线快速提取算法,通过实时检测并转换拖拉机车体一侧的耕作土边界线的航向偏差,来实现拖拉机的视觉导航。首先基于转换速度优选出YCbCr颜色空间,对灰度化后的图像进行导向滤波处理;再通过改进抗噪形态学算子快速提取耕作土的边缘信息,经Hough变换后给出视觉导航线,并探究航向小偏差时的最优模板。
对比实验结果表明,YCbCr与HSV,HIS和2R-G-B颜色空间相比,其转换时间最短为0.094 s。导向滤波法相比于其他热门滤波方法(例如Tarel,多尺度Retinex,小波域Retinex),不仅可以有效地区分耕作土壤之间的边界,还具有最快的处理速度,仅耗时0.113 s。 用来提取土壤边界线的改进抗噪形态学算子与其他边缘提取算子(例如Sobel,Roberts,Prewitt和Log)相比,具有更佳的精度和运算速度。在图像中比较不同尺寸模板的辨识精度与速度后,尺寸为140×260像素的最佳模板在航向偏差不大于7.5°时可以实现高精度的视觉导航。
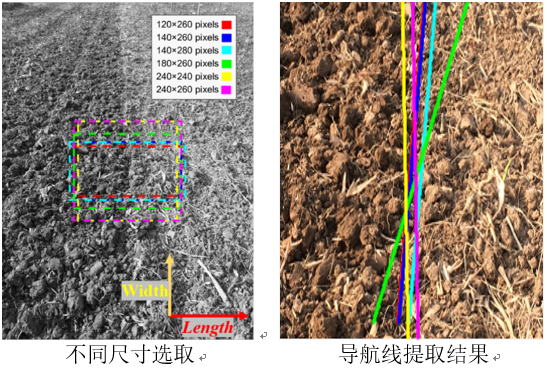
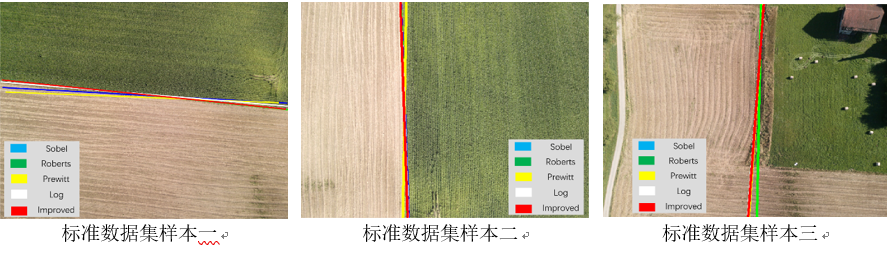
理论上,该算法最优模板和全局模板能够正常工作时对应的拖拉机最大耕作速度分别为51.41 km/h和27.47 km/h,可以满足实际中智能拖拉机耕种作业中实时视觉导航的要求。视觉导航实验结果证明了该基于耕作土壤边界线的拖拉机视觉导航算法,具有广阔的应用前景。为进一步验证算法的性能,该研究团队还选取了国际标准数据集来对算法的实用性与适应性进行研究验证,结果表明该算法较现有算法具有明显的优势和良好的普适性。
详细见:Wei Lu, Mengjie Zeng, Ling Wang, Hui Luo, Subrata Mukherjee, Xuhui Huang and Yiming Deng. Navigation Algorithm Based on the Boundary Line of Tillage Soil Combined with Guided Filtering and Improved Anti-Noise Morphology. Sensors 2019, 19(18), 3918; https://doi.org/10.3390/s19183918