祝贺实验室研究成果被国际学术期刊《IEEE/CAA Journal of Automatica Sinica》录用
2022-04-24 智能机器人实验室
祝贺实验室研究成果被国际学术期刊《IEEE/CAA Journal of Automatica Sinica》录用
2022年4月24日,我实验室团队攥写的论文题为《On Dual-Mode Driving Control Method for a Novel Unmanned Tractor with High Safety and Reliability》被自控领域顶级期刊《IEEE/CAA Journal of Automatica Sinica》录用(IF=6.688,Q1,第一署名单位为南京农业大学,第一作者和通讯作者为卢伟副教授(南京农业大学),第二作者为李家诚)。
考虑到在非标准化和复杂农田环境下,完全自主的拖拉机无人驾驶具有较大的安全作业隐患,而拖拉机远程驾驶(遥操作)又对驾驶人员的操作经验具有一定要求,且由于需要长时间集中注意力,操作人员容易疲劳。针对解决这些问题,卢伟团队提出了一种拖拉机双模式驾驶控制策略,以综合两种方法的优点,提高无人拖拉机作业效率。
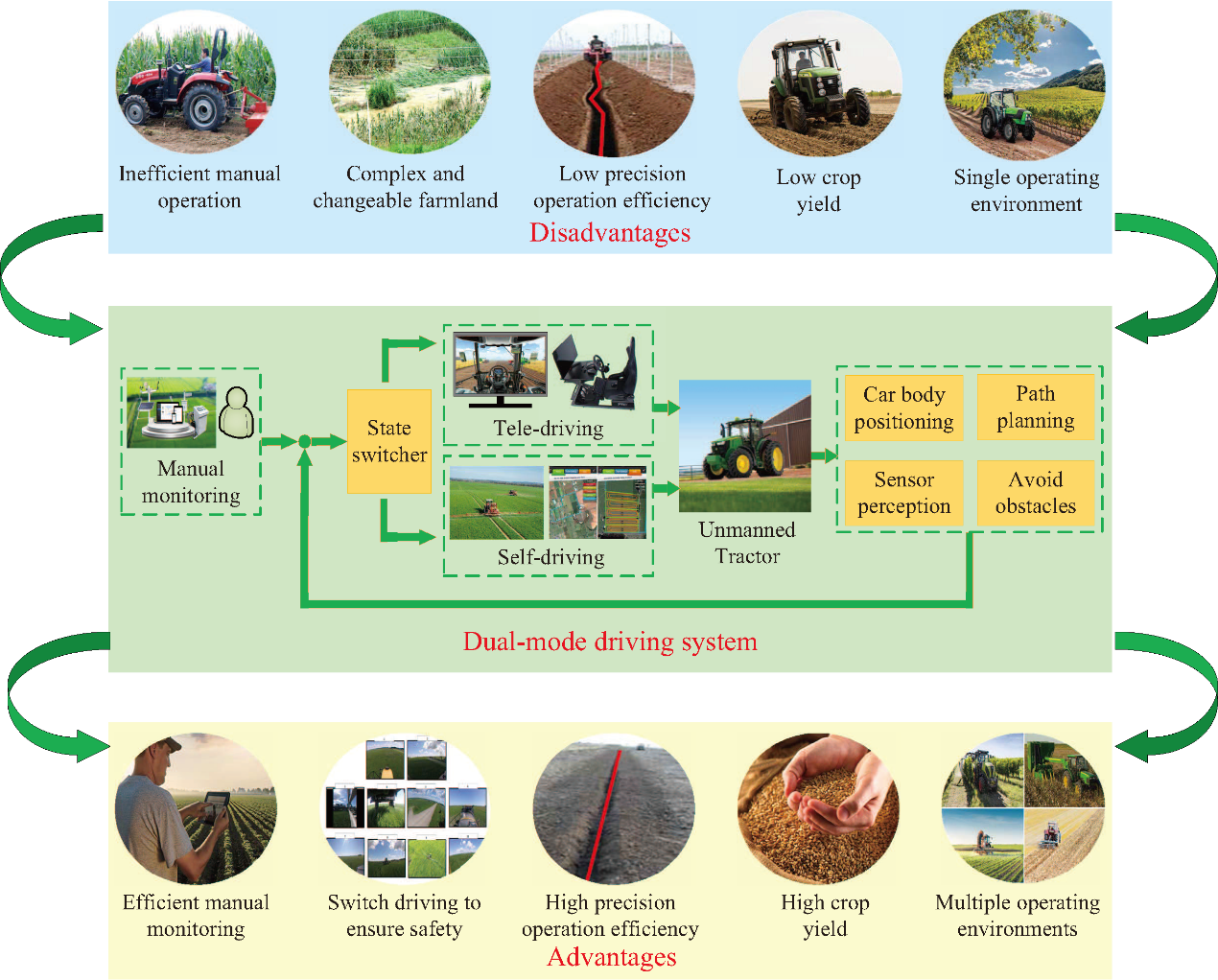
首先,团队基于无人拖拉机在驾驶过程中的状态变化量,将无人拖拉机的驾驶模式精细划分为五个标准驾驶模式,完整涵盖了无人拖拉机在驾驶过程中的全部驾驶情况,并针对五种驾驶模式提出对应的控制修正方法,使无人拖拉机可以有效跟踪预定期望路线,安全、高效的完成无人驾驶任务。
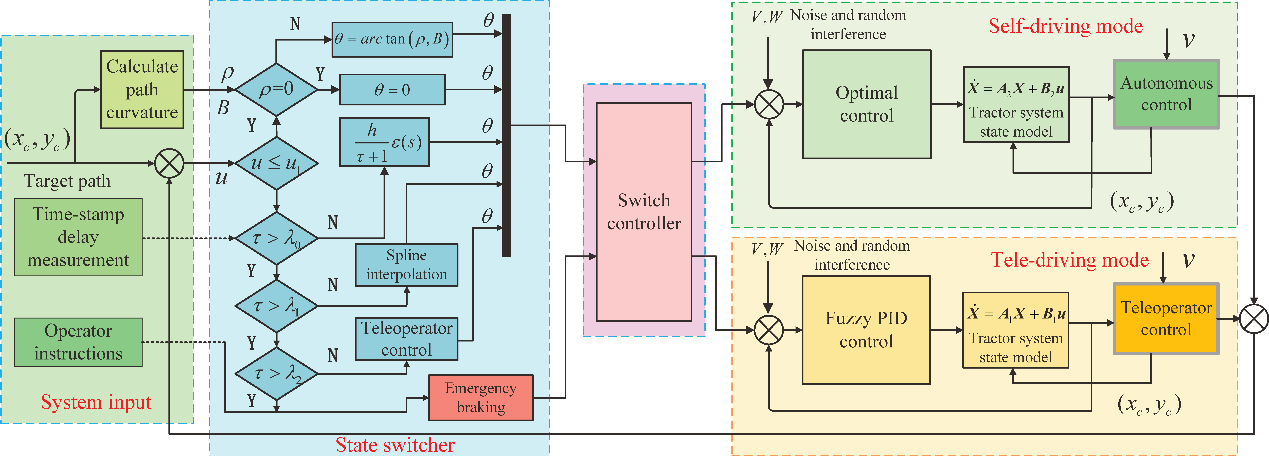
此外,团队针对现有无人拖拉机驾驶中的安全切换驾驶问题,提出了一种高稳定性、高可靠性的多模式切换控制方法。通过设计无人拖拉机驾驶模式自动切换标准与逻辑,将原自动驾驶模式和遥操作驾驶模式相结合,以应对复杂多变的农业环境和未知干扰,使无人驾驶拖拉机在多传感器信息融合、传感器信息缺乏和传感器信息延迟的情况下具有较强的鲁棒性。
本论文的研究内容涉及通信理论、控制理论、无人驾驶技术、计算机网络技术等多个领域,对不同学科的交叉融合具有重要价值。此外,本论文中的双模控制方法具有较好的工程应用前景,为无人驾驶和智慧农业提供了可靠的理论支持和应用实例。
关于《IEEE/CAA Journal of Automatica Sinica》:根据Scopus数据库,JAS的最新CiteScore为8.3,位于所属各领域Q1区前列:计算机信息系统领域排名前9%,控制与系统工程领域排名前11%,人工智能领域排名前12%。根据《中国英文学术期刊国际国内引证报告》,JAS的国内外综合他引影响因子达6.688,国际他引影响因子、国内他引影响因子、国内外综合他引影响因子三项指标在自动化、计算机领域全部排名第1; JAS自首次参评以来连年荣获“中国最具国际影响力学术期刊”称号(Top5%)。