祝贺实验室研究成果被国际学术期刊《Computers and Electronics in Agriculture》录用
2026-01-13 具身智能实验室
祝贺实验室研究成果被国际学术期刊《Computers and Electronics in Agriculture》录用
2026年1月13日,我实验室团队攥写的论文题为《Mushroom(Agaricus bisporus) picking robot based on mimicry of manual harvesting》被农业领域顶级期刊《Computers and Electronics in Agriculture》录用(IF=8.9,Q1,第一作者为顾曜,第二作者为李宝智)。
在双孢菇栽培中,工厂采用恒温恒湿环境与机械化生产设备,旨在实现四季高效生产与供应。然而,采摘环节仍高度依赖人工操作,严重制约产业发展与企业效益提升。为此,开发自动化蘑菇采摘装备迫在眉睫。本文受人工采菇动作启发,系统研究并研制了一款仿生蘑菇采摘机器人。
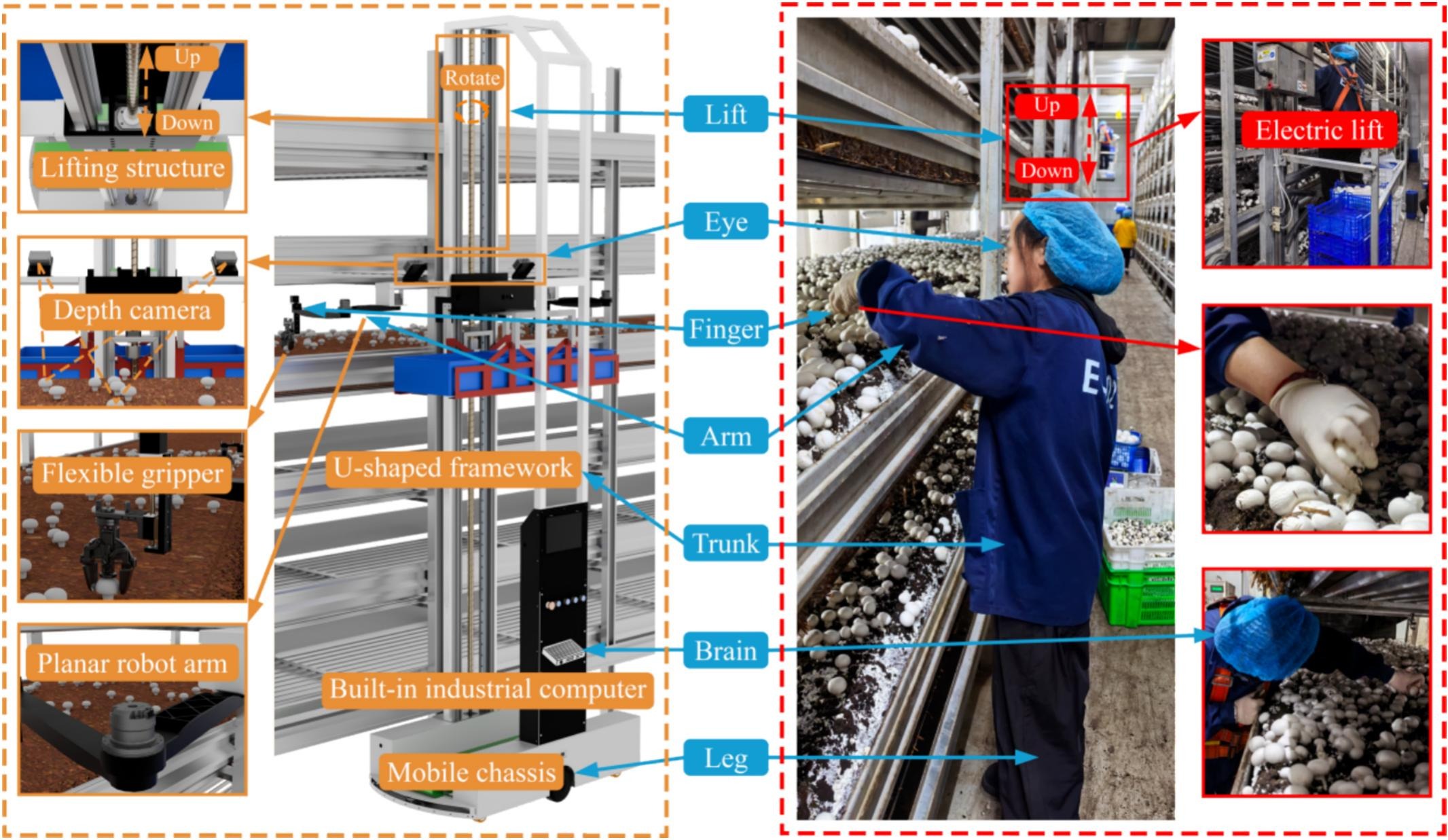
首先,依据在菇架间自主移动、触达不同高度菇床,以及实现轻量化、低能耗与高效率作业等要求,完成了机器人的构型优化设计。其次,开发了机器人测控系统,实现了作业位姿与目标信息的检测,并对各执行机构实现了动态精准控制。随后,先后研发并实现了基于YOLOv8n的蘑菇快速识别、尺寸测量与定位算法,以及采菇夹爪的柔顺控制算法。
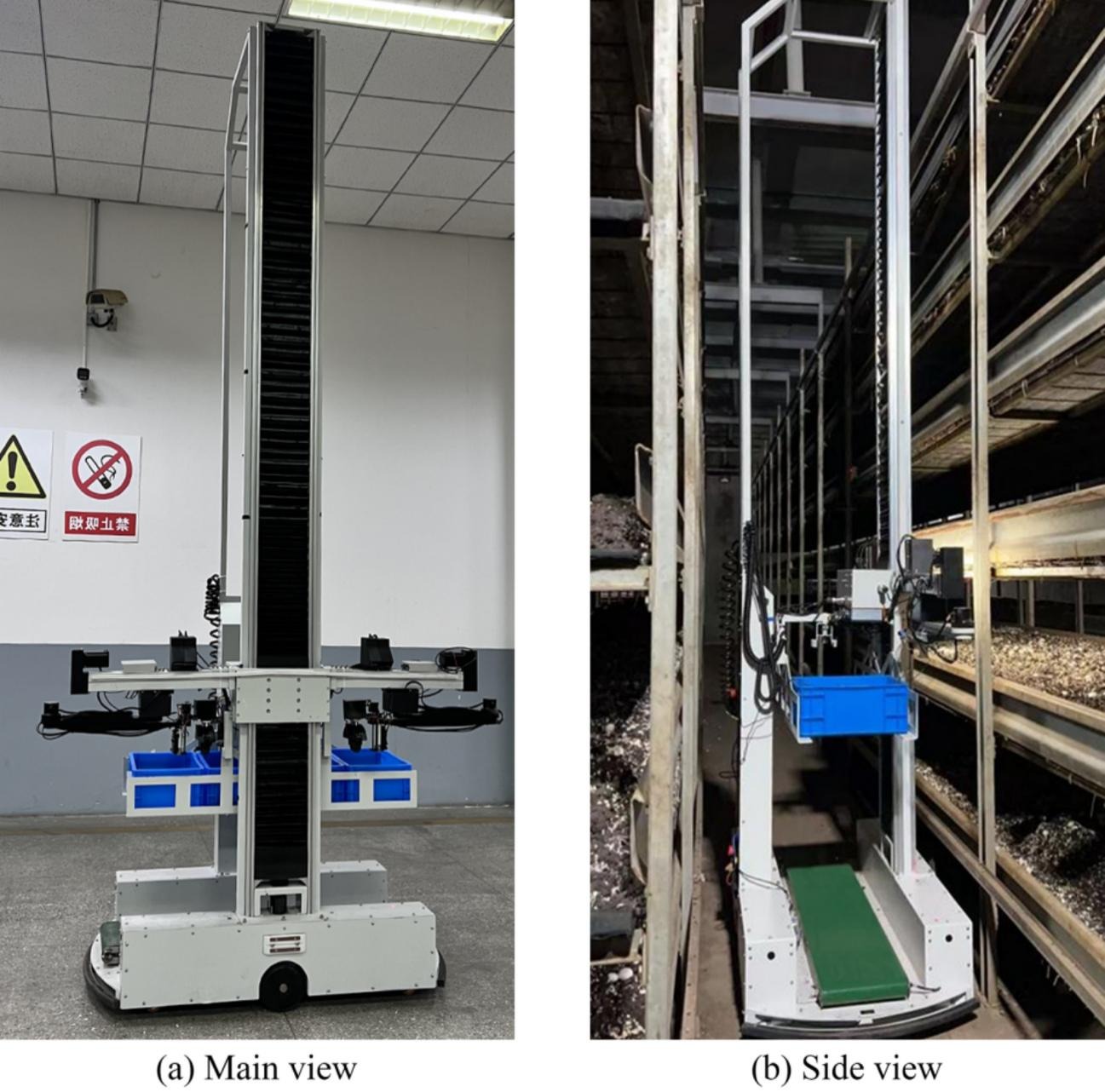
在蘑菇工厂进行了实地采收试验。结果表明:机器人的识别与定位误差小于1厘米,采收成功率达99.3%,蘑菇损伤率低于3.2%,平均采收效率为每小时20.8公斤,相当于一名熟练工人的作业效率。试验结果验证了机器人结构设计的合理性、视觉算法的准确性与控制系统的鲁棒性,表明该系统能够有效实现多层菇床的自动化采收作业。
本论文的研究内容成功解决了工厂化蘑菇生产中依赖人工、效率低下的核心瓶颈。它通过仿生双臂设计、刚柔结合夹爪和智能视觉系统,在真实菇场实现了每小时20.8公斤(相当于一名熟练工人)、损伤率低于3.2%的高效无损采摘。这为产业提供了经实地验证的自动化方案,能直接降低占生产成本70-80%的人工费用,是推动蘑菇种植迈向全程智能化、提升产业竞争力的关键一步。
《Computers and Electronics in Agriculture》是 Elsevier 出版的农林科学与计算机电子交叉领域国际权威期刊,创刊于 1985 年,月刊出版,ISSN 为 0168-1699(印刷版)、1872-7107(电子版),被 SCIE、Scopus 等数据库收录,2024 年影响因子达 8.9,JCR 分区为农业综合 Q1、计算机跨学科应用 Q1,中科院升级版农林科学大类 2 区、农业综合小类 1 区、计算机跨学科应用小类 2 区。