ResearchProject

Variable structure field high throughput crop phenotypic detection robot
This project adopts parallelogram push rod to adjust the height and width of the mobile platform. The instrument detection bin adopts modular design and can carry a variety of instrument bins, which is easy to disassemble and assemble and can realize a variety of functions.

Bisporus mushroom artificial human picking intelligent robot
This paper aims to develop an intelligent picking robot of bisporus mushroom. Solve the problem of high labor intensity of picking workers, low efficiency of picking, and high human cost of mushroom planting factories.

Tractor driving robot
With the help of multi-sensor data fusion technology, real-time tractor position, attitude, speed and other information is extracted for fusion processing, to meet the needs of agricultural machinery operation applications in complex environments such as fields and orchards.
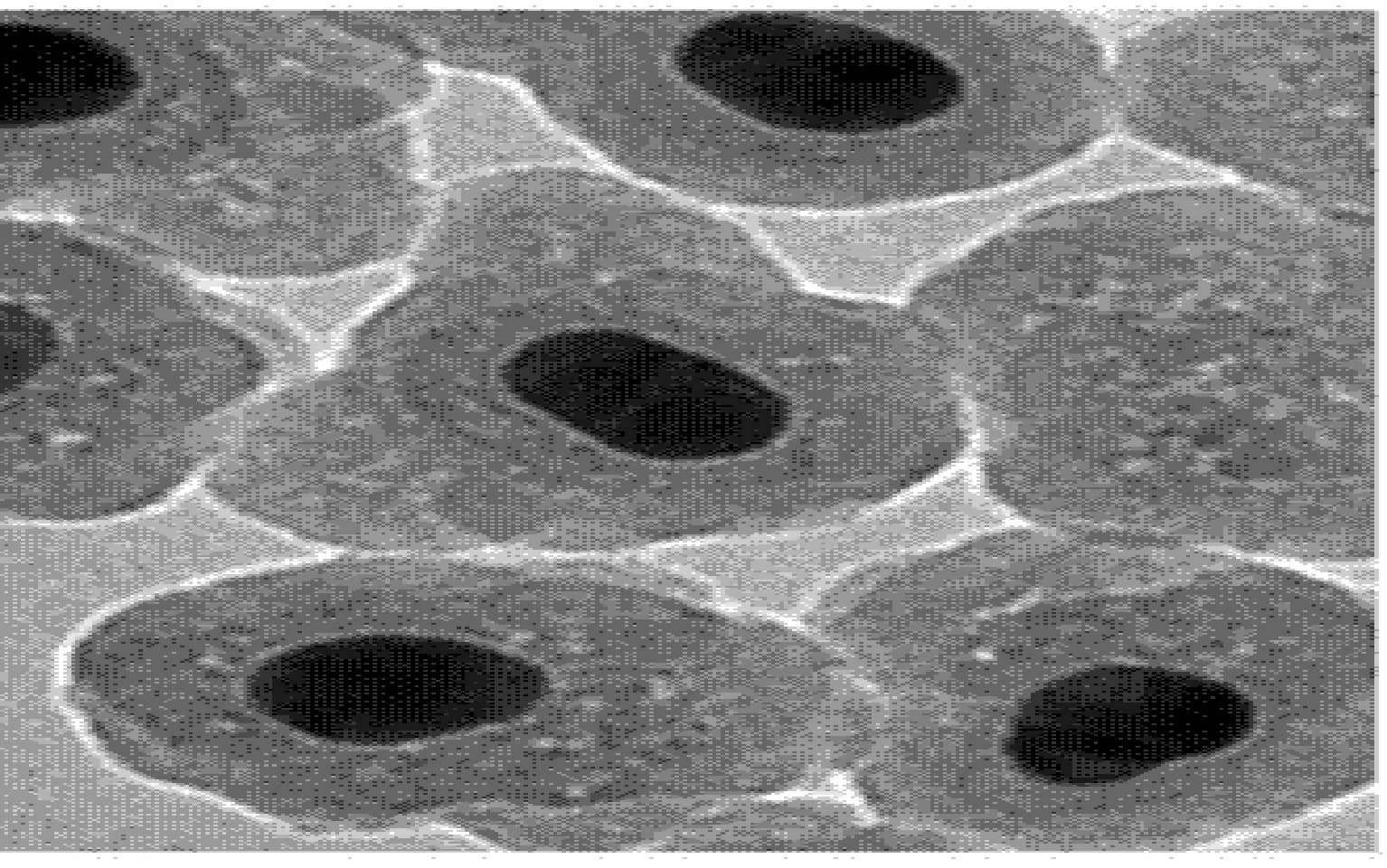
Detection of soybean seed tissue based on spatial frequency domain imaging
The transmission law of spatial frequency domain diffuse photons in soybean seeds and the characterization mechanism of optical properties of internal tissue of soybean seeds were explored, and the measurement method of optical properties of internal tissue of soybean seeds based on spatial frequency domain hyperspectral imaging technology was established.

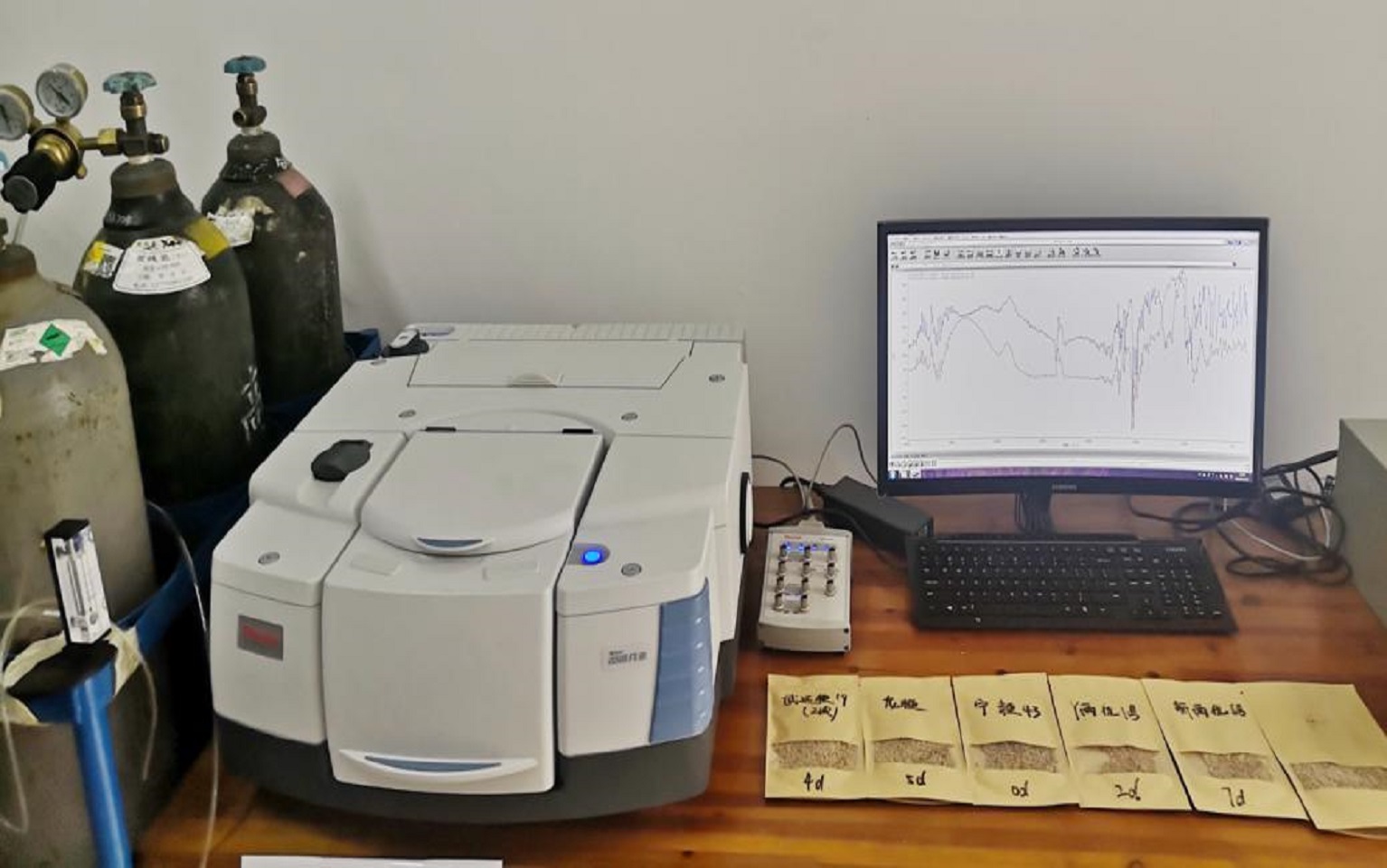
Determining law of oil quality and fast identification technology of waste point
The deterioration of oil quality in the frying process will decrease the nutritional value. The study on the deterioration law of oil in the frying process of Xinjiang specialty food is of great significance to ensure the nutritional value of food.

Egg quality nondestructive testing line system
The egg detection technology based on machine vision technology of structured light and multi-sensor information fusion based on magnetostrictive material swept-frequency vibration method takes the crack grade of egg as the main index of quality detection

Field high throughput crop phenotype detection mobile robot
A joint research project between Nanjing Agricultural University and Michigan State University in the United States, the project carried out research on phenotypic detection technology of high-throughput crops in the field and key technologies of multi-source information fusion using mobile robots as the carrier.
Enhanced Fluorescent Probe for the Detection of Trace Hg2+ Ions in Fruit and Vegetable
The enhanced fluorescent probe equipment developed by the project is mainly used to detect the very small amount of Hg2+ ion in fruits and vegetables, so as to create a favorable environment for building a healthy diet from the root.

Research on Walking Mechanism of Foot Robot in Paddy Field for Agricultural Information Acquisition
In recent years, the rapid and effective collection and transmission of agricultural information is an important basis for the development of smart agriculture. This project uses a foot-mounted robot to collect information, which can alleviate the problem of soil compaction compared with large agricultural equipment.
Rapid nondestructive testing of hybrid rice seed quality based on photoacoustic spectroscopy
In view of the shortcomings of traditional vigor detection methods such as complex operation, long time consumption, poor reproducibility, damage to seeds and irreversible, this project proposed a fast nondestructive detection method for hybrid rice seed quality based on photoacoustic spectroscopy.

Rapid nondestructive testing of single grain seed quality based on multidimensional spectral image of structured light
In this paper, the biological characteristics and three-dimensional optical characteristics of the typical varieties of seeds from the main producing areas of grain, rice, wheat and corn in China were studied after deterioration and infection.
