研究项目

变结构田间高通量作物表型检测机器人
本项目采用平行四边形推杆实现移动平台的高度和宽度调节,仪表检测仓采用模块化设计,可搭载多种仪表仓,便于拆装,可以实现多种功能。

双孢菇仿人采摘智能机器人
旨在研制一种双孢菇智能采摘机器人。解决采摘工人劳动强度大、采摘效率低、蘑菇种植工厂用人成本高等问题。

拖拉机驾驶机器人
借助多传感器数据融合技术,提取实时拖拉机位置、姿态、速度等信息进行融合处理,满足大田、果园等复杂环境下农机作业应用需求。
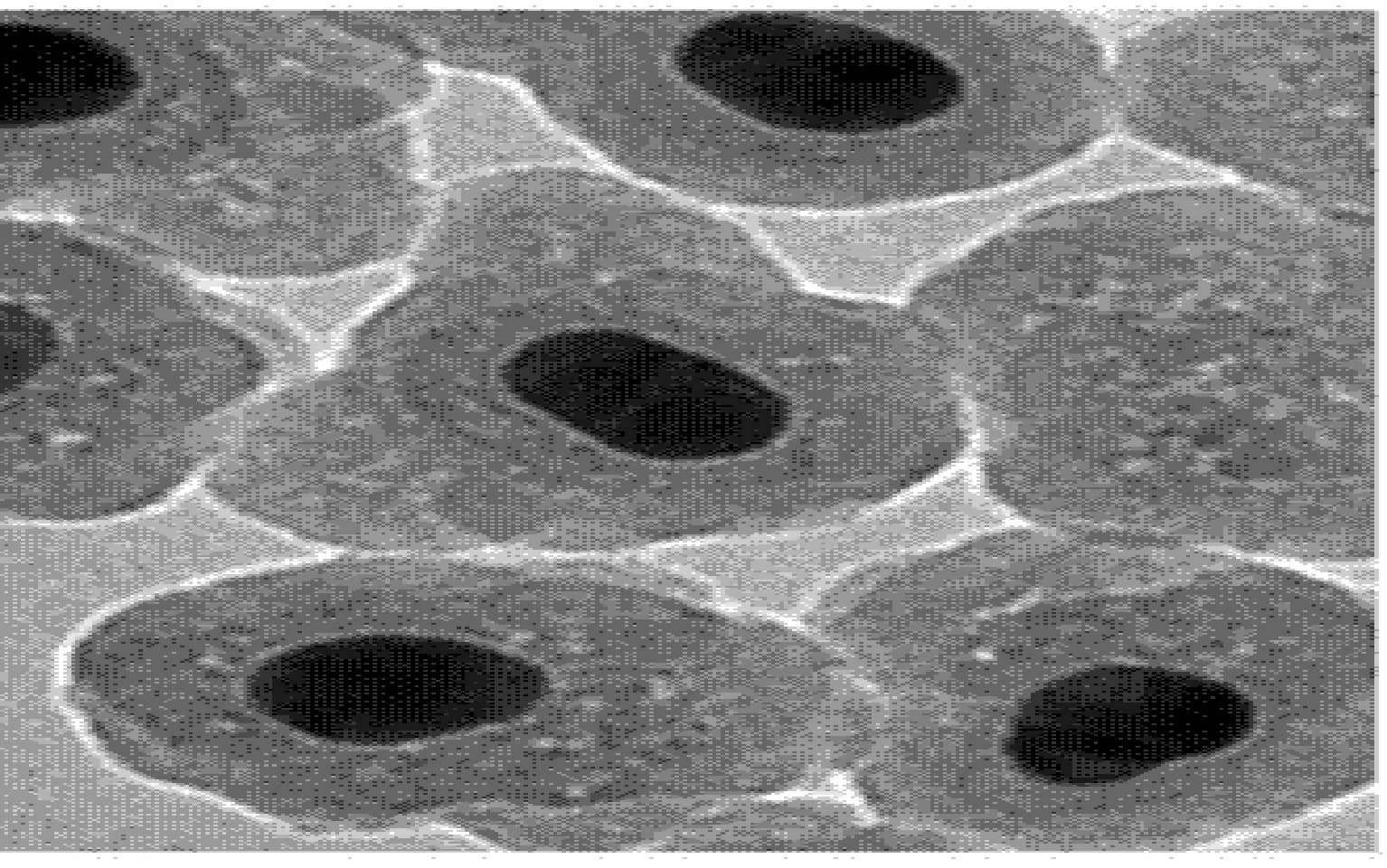
基于空间频域成像的大豆种子组织检测
探究空间频域漫射光子在豆种中的传输规律及对豆种内部组织光学特性的表征机理,建立基于空间频域高光谱成像技术的豆种内部组织光学特性测量方法。

油脂品质劣变规律及废弃点快速判别技术
油脂品质在煎炸过程中发生品质劣变会使营养价值下降,本项目研究新疆特色食品油炸过程中油脂劣变规律,对保证食品营养价值有重大意义。

禽蛋品质无损检测流水线系统
基于结构光的机器视觉技术和基于磁致伸缩材料的扫频式振动法的多传感器信息融合的禽蛋检测技术,以禽蛋裂纹等级作为品质检测主要指标的检测

大田高通量作物表型检测移动机器人
南京农业大学与美国密歇根州立大学联合研究项目,项目以移动机器人为载体开展田间高通量作物表型检测技术及多源信息融合关键技术研究。
面向果蔬痕量Hg2+离子检测的增强荧光探针
项目所研制增强荧光探针设备主要用于对果蔬中极少含量的Hg2+离子检测,从而为营造健康饮食从根源上创造有利环境。

激光打顶除草机器人
该项目所研制的激光打顶机器人通过“机器换人”可破解人工打顶费工费时效率低和化学打顶易污染的难题,实现棉花高效、绿色、物理打顶,为棉花打顶提供一种新的绿色、低碳方法与技术装备,具有重要的市场应用价值。
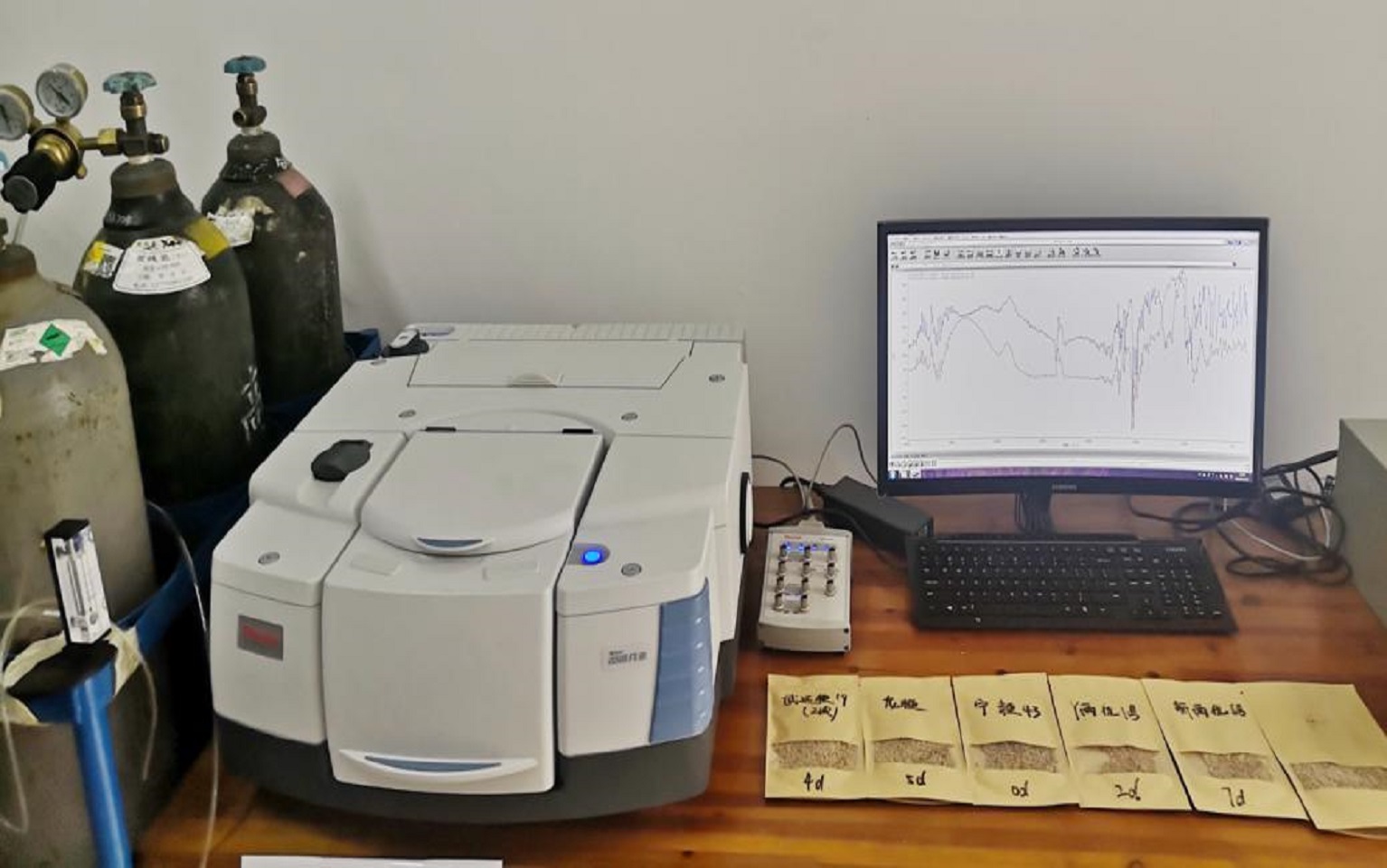
基于光声光谱的杂交稻种质量快速无损检测
针对传统活力检测方法存在操作复杂、耗时长、可重复性差、对种子造成损伤且不可逆等不足问题,该项目提出一种基于光声光谱的杂交稻种质量快速无损检测方法。

基于结构光多维谱像的单粒谷物种子质量快速无损检测
针对我国禾谷类稻、麦、玉米主产区的典型品种种子,研究其劣变和染菌后的生物特性及三维光学特性表征。

智能管道检测机器人
该项目提出了一款包含折展可控行走机构、运动姿态偏转机构、电气控制仓、感知检测单元的四部分的铰接轮式管道机器人。